About OpenMuscle
The Origin Story
OpenMuscle started with a story that Tory couldn't shake: an amputee who was fitted for a prosthetic hand but couldn't take it home because of proprietary restrictions on the technology. The sensors, the software, the control systems — all locked behind corporate walls.
That moment was the catalyst. Tory, a self-taught hardware engineer, decided that prosthetic sensor technology needed to be free. Not free as in "free trial" — free as in free for all humanity, forever, under open licenses that ensure no corporation can ever lock it away again.
Instead of using expensive EMG sensors that pick up electrical noise, OpenMuscle takes a different approach: pressure myography. Simple, affordable pressure sensors detect the physical topology changes of forearm muscles during contraction. Combined with machine learning, this can predict individual finger movements — the key to controlling a prosthetic hand. And the whole thing costs about $45 in components.
Our Mission
Democratize prosthetic sensor technology. Build affordable, open-source, open-hardware pressure myography sensors that anyone can build, modify, and improve. Every design file, every line of code, every dataset is published openly under MIT (software), CERN-OHL-S v2.0 (hardware), and Creative Commons (documentation) licenses.
Project Timeline
The Very First Prototype
A single 2×2 pressure sensor cell — the first working prototype ever built. Proof that pressure myography could detect muscle contractions. OpenMuscle is born.
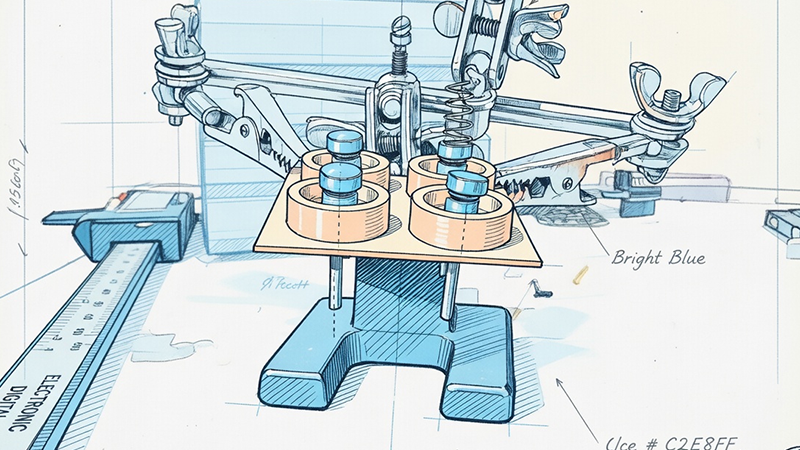
Piston Hall & Magnet Sensors
First piston-based Hall effect and magnet sensor assembly. Hand-built, hand-tested — figuring out how to reliably measure muscle topology changes through pressure.
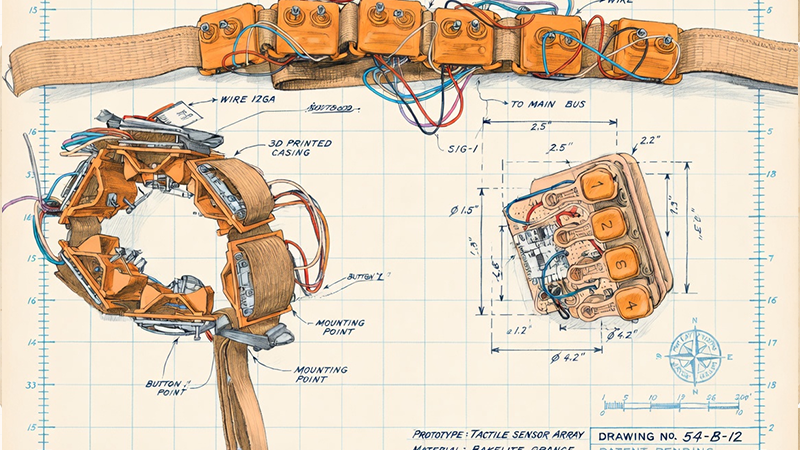
OM-12 Custom Piston Sensors
The OM-12 band takes shape with 12 custom piston sensors arranged around the forearm. This was the design before the keyboard switch upgrade simplified manufacturing.
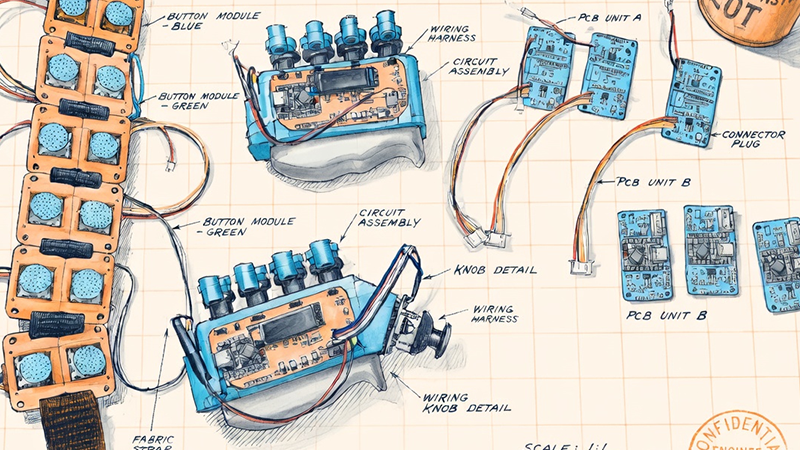
OM-12 + LASK-5 Data Collection
Keyboard switches replace custom pistons. The LASK-5 labeling device captures ground-truth finger positions. First real paired datasets for ML training. Featured on Hackaday and Electromaker.
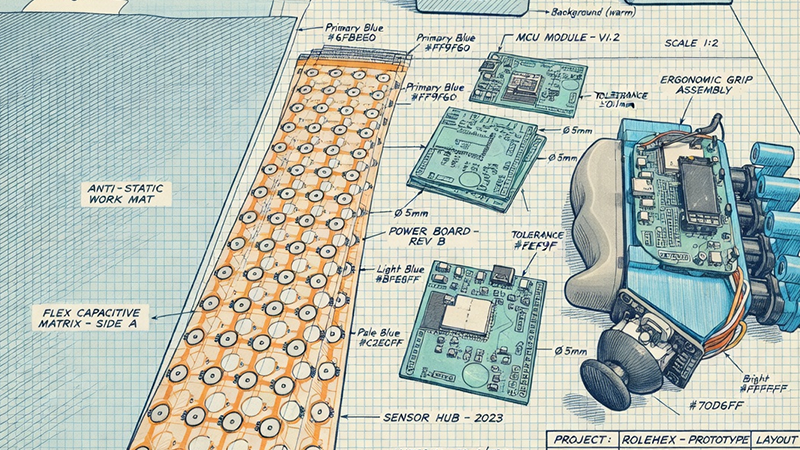
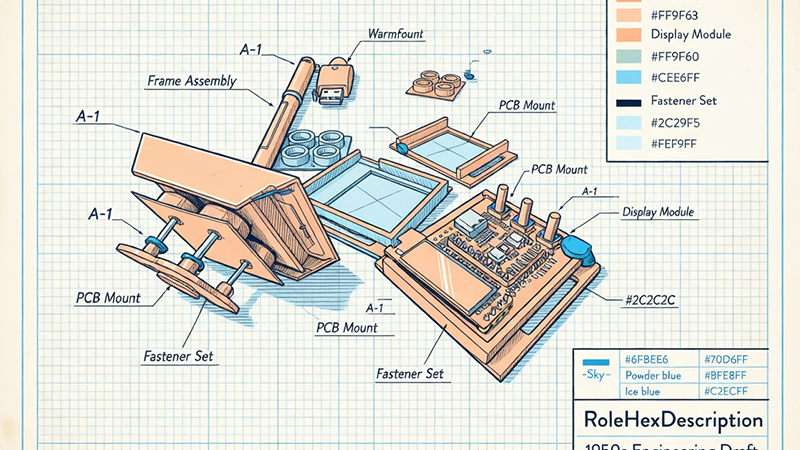
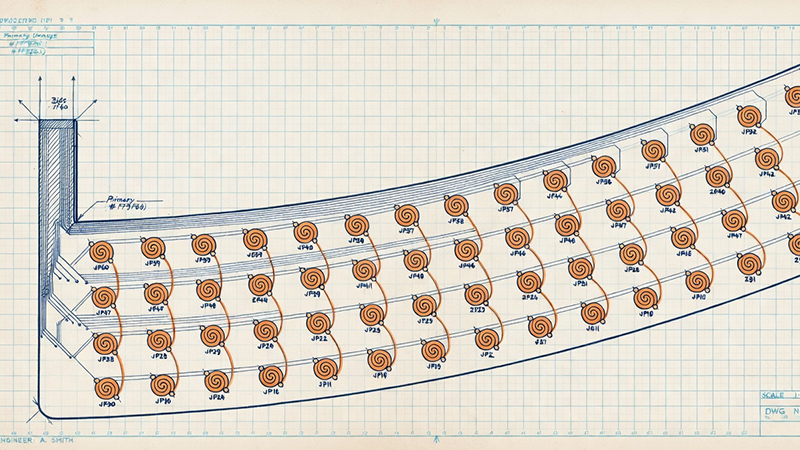
FlexGrid + LASK-5 Prototype
The FlexGrid concept comes to life — 60 sensors in a 15×4 flexible PCB grid paired with the LASK-5 for labeled data capture. A massive leap from the 12-sensor OM-12.
FlexGrid Flexible PCB (Current)
The current flagship: a production-quality flexible PCB design with ESP32-S3, 60 pressure sensors at just 3mm thick. Ready for community testing and iteration.